
唐山汇博机器人培训学校
咨询热线 400-6169-615

课程详情 学校简介 学校地址 网上报名
关键词:唐山工业机器人现场工程师集成班 工业机器人现场工程师集成班 工业机器人培训
不同型号PLC的特性差异
例如FX系列、Q系列等不同型号的三菱PLC,在硬件方面存在差异,这会影响到高级编程中的一些操作。如在输入/输出控制方面,不同型号的PLC(如FX1N,FX2N,FX2NC)的数据输入/输出端子[D]可能有不同的特性,输入/输出触点组合指令[I]也会有所不同,编程时需要根据实际使用的PLC型号来进行相应的设置和操作。

三菱PLC高级编程技巧
一、编程规范
命名规则
在三菱PLC编程中,遵循良好的命名规则是非常重要的。对于输入输出点、中间继电器、定时器、计数器等元件都应该采用有意义的命名。例如,对于一个控制电机启动的输入按钮,可以命名为“Motor_Start_Button”,这样在查看程序时,能够很容易理解该元件的功能。
对于数据存储区和变量也应该采用合理的命名方式。如果是存储电机速度的变量,可以命名为“Motor_Speed”。这样不仅方便自己编写和维护程序,也方便其他工程师在后续的调试或修改工作中理解程序逻辑。
注释的使用
注释是程序中不可或缺的部分。在编写复杂的程序时,应该对关键的逻辑部分、功能模块、指令的作用等添加注释。例如,在一段用于计算产品数量的程序段旁边,可以添加注释“//此段程序用于统计生产线上的产品数量,通过计数器C0实现”。
对于一些复杂的算法或者特殊的控制逻辑,详细的注释能够帮助其他人员快速理解程序的意图。注释还可以记录程序的修改历史,例如“//2024 - 05 - 10修改,增加了对异常情况的处理”。

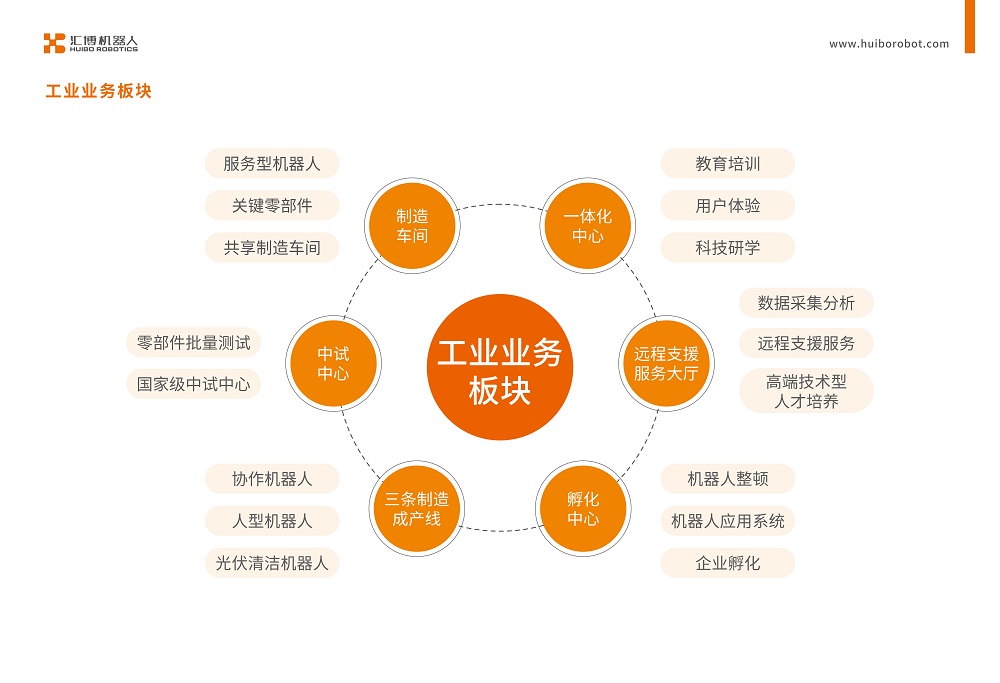
江苏汇博机器人技术股份有限公司(以下简称“汇博机器人”)与曹妃甸区政府携手合作,共同投资3亿元人民币,新建15000平集研发、制造、教育与服务于一体的实习实践共享协同创新中心。该中心将重点围绕协作机器人、人形机器人等服务机器人类型的电机、减速器、舵轮、底盘一体化关节等研发、设计及批量制造进行重点建设,并建设关键零部件测试、验证等分中心,建设协作机器人、人形机器人生产线及服务机器人应用系统展示中心。
该中心生产孵化的产品及服务可广泛应用于民生、养老、教育、医疗及特种服务等领域,带动京津冀人才流动和技术传播,为当地新质生产力发展及京津冀协同发展做出重大贡献,努力建设成为国内有重大影响力的共享协同创新中心。
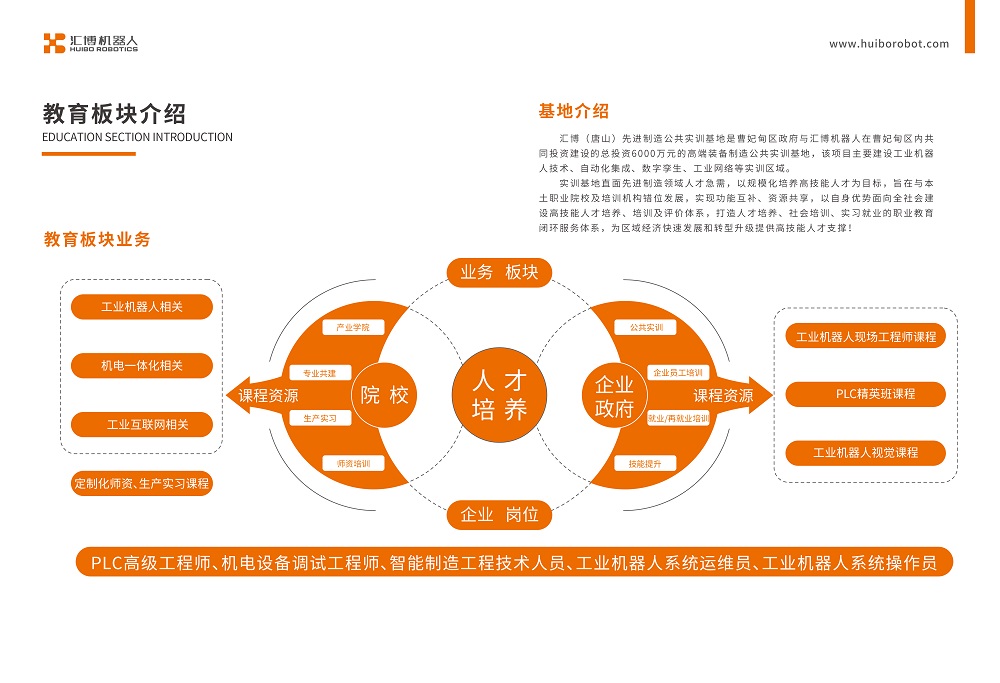
汇博(唐山)先进制造公共实训基地是曹妃甸区政府与汇博机器人在曹妃甸区内共同投资建设的总投资6000万元的高端装备制造公共实训基地,该项目主要建设工业机器人技术、自动化集成、数字孪生、工业网络等实训区域。
实训基地直面先进制造领域人才急需,以规模化培养高技能人才为目标,旨在与本土职业院校及培训机构错位发展,实现功能互补、资源共享,以自身优势面向全社会建设高技能人才培养、培训及评价体系,打造人才培养、社会培训、实习就业的职业教育闭环服务体系,为区域经济快速发展和转型升级提供高技能人才支撑!
工业基础
智能制造专业培训基地
线上线下一体化学习体验
依托汇博机器人工业项目
设有2000平米的先进培训基
实现了线上线下课程体系的无
(包括江门东鹏洁具的全地,内配备与智能制造行业最缝整合
为学员提供了流畅的自动改造等)的实施,
以新技术同步的高端实训设备,学习体验。
及组织全国性的智能制造
确保了与企业实际使用设备
与机器人竞赛,我们积累
的一致性。同时,高级实训设
了深厚的教育经验并创造
施为高质量人才培育提供了
了众多成功案例。
充足的资源和专业的场地支持。



实训区包含工业控制实训系统,适用于机电一体化、自动化等多个专业的教学与实训学生可掌握三菱PLC基础、威纶通触摸屏基础、西门子PLC基础、昆仑通态触摸屏基础、
气缸控制编程、异步电机的变频器多段速调速控制编程等知识,为从事相关行业打下坚实基础

学校名称:唐山汇博机器人培训学校
固定电话:400-6169-615
授课地址:河北省唐山市曹妃甸区行知路25号汇博先进制造公共实训基地 预约参观





